Le parachute est un équipement destiné à ralentir la chute d'un objet ou d'un humain de telle manière que lors de l'atterrissage, l'objet ne sera pas détruit ou la personne blessée ou tuée. Cet équipement est constitué d'une large toile ralentissant la chute de la personne en engendrant une forte résistance de l'air. Les parachutes sont constitués de matériaux légers comme la soie ou le nylon. Pour qu’un parachute soit efficace, il faut que la vitesse terminale soit de l'ordre de 30 km/h, ce qui correspond à 8 m/s ou à la chute d'un deuxième étage.
Modèle ultra simplifié : vitesse acquise au cours d'une descente
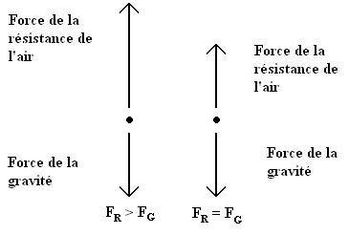
Au départ de la chute du parachutiste depuis un avion, la résistance de l’air est initialement inférieure au poids, donc la chute s'accélère. Le parachutiste est au tout début en quasi-apesanteur à 0 g, son accélération étant de 1 g vers le bas. Cette résistance de l'air croît proportionnellement au carré de la vitesse de chute, jusqu'à égaler le poids, et la vitesse se stabilise[1]. Le processus est illustré dans les liens [2],[3].
L'accélération décroît progressivement jusqu'à ne plus être que d'environ 0,1 g dans la position cambrée au bout d'une minute environ, juste avant l'ouverture du parachute. Un parachutiste qui chute en position allongée horizontalement, dite « cambrée », rencontre davantage de résistance qu'en chutant en position profilée verticale (environ 300 km/h), et descend donc moins vite (environ 200 km/h), son maître-couple étant supérieur[4],[5]. Dans des positions très particulières, des vitesses instantanées de chute de 450 km/h ont pu être obtenues[6].
Lorsque le parachutiste ouvre son parachute, l’air s'engouffre dans la voilure et impose une forte résistance, initialement plus grande que le poids : la chute est freinée en quelques secondes d'environ 200 km/h à 15 km/h, ce qui procure une accélération vers le haut entre 3 et 6 g qui donne au parachutiste l'impression illusoire de remonter[7]. La vitesse diminuant, la résistance de l'air diminue aussi jusqu'à égaler le poids, et la vitesse se stabilise à nouveau, mais à une valeur beaucoup plus petite que sans parachute (environ 15 km/h).
À propos de la détermination de la surface minimale du parachute, voir également le menu déroulant "Détermination de la taille du parachute par M. le chevalier Du Buat" dans l'article Parachute.
Par comparaison, le parapente de voilure encore plus grande, tout comme un deltaplane, offre une résistance telle que les courants ascendants de l'air lui permettent de rester en suspension et même de monter.
Cependant, ce modèle est très incomplet car l'accélération n'est pas constante, mais l'« à-coup » est lui constant. Ce point sera discuté très en détail plus bas.
Chute libre
Parachute ouvert
Graphique vitesse-temps
Chute d'une personne
Un être humain en position verticale ne peut guère supporter une accélération de plus de 5 g. Au delà, le parachutiste sera victime d'un voile noir. En position horizontale sur le ventre, le parachutiste pourrait subir une accélération de 20 g (yeux sortant des orbites). L'accélération maximale tolérée dépend du temps d'exposition. De toute façon, toute accélération supérieure à 30 g est mortelle[8]. En outre, le parachutiste peut être victime de séquelles incurables ; cependant, certaines personnes ayant subi des accélérations de 18 g ont totalement récupéré. Il importe donc de concevoir un parachute qui ralentisse suffisamment la personne et ne la soumette pas à des accélérations insensées[9]. Par conséquent, une ouverture quasi-instantanée du parachute n'est pas souhaitable[10].
est la masse de l'assemblage parachutiste + parachute.
Le rôle du parachute est de limiter la vitesse de chute terminale du parachutiste, en augmentant considérablement la résistance de l'air (parce que sa présence augmente fortement la surface et, dans une moindre mesure, le coefficient ).
Vitesse limite
La résultante des forces appliquées à un objet pendant sa chute, comptée positivement vers le bas, est .
L'accélération de l'objet est .
En début de chute, lorsque la vitesse est encore faible, la résistance de l'air est beaucoup plus faible que le poids, et la chute s'accélère.
La vitesse augmentant, la résistance de l'air finit par équilibrer le poids et la vitesse de chute tend vers une constante appelée vitesse limite (ou vitesse terminale).
La vitesse terminale, définie par donc , se calcule facilement :
Modèle « naïf » du parachutiste
On effectue l'hypothèse incorrecte que le parachute s'ouvre instantanément.
L'équation dynamique s'écrit donc :
Soit la vitesse initiale de chute du parachute lors de l'ouverture du parachute. On suppose que le parachutiste est en chute libre.
On définit
La loi de vitesse est la suivante :
Résolution de l'équation différentielle
On obtient donc :
Donc,
Donc,
On rappelle que la vitesse terminale est :
L'équation différentielle à résoudre est donc:
On décompose en élements simples. On remarque que:
On obtient donc:
Donc,
On définit
On résout donc :
On calcule la primitive. Donc,
Donc,
Donc,
Donc,
Donc,
Donc,
Donc,
On suppose qu'à t = 0, alors v = v0. Donc,
Donc,
Donc,
Et donc:
On constate que lorsque alors comme attendu.
On note que secondes.
On rappelle que la vitesse terminale est :
Après substitution, on montre que la décélération initiale est la suivante :
On remarque que :
Donc,
Ce modèle est manifestement invalide car si l'on suppose que et , ces 2 valeurs étant raisonnables, alors le parachutiste subirait une accélération de 100 g qui le tuerait à coup sûr [8].
Ouverture en temps fini
Parachute moderne en forme rectangulaire. Au cours du déploiement, la surface augmente linéairement avec le temps.
Il est connu que la distance parcourue lors de l'ouverture du parachute est indépendante des conditions initiales[11]. Cela a été justifié par French[11].
Évolution du facteur de charge en fonction du temps pour un parachute
Donc le modèle du déploiement instantané est invalide et il est aussi contredit par l'expérience. En effet, Knack[12] a démontré que le temps d'ouverture était fini et que le jerk était constant comme montré dans la figure ci-contre.
En outre, Potvin[13] a confirmé expérimentalement les résultats de Knack et a démontré expérimentalement que l'accélération maximale était de l'ordre de 5 à 7 g et que l'accélération augmente linéairement en fonction du temps jusqu'au déploiement complet (pour les parachutes en forme rectangulaire). Ces résultats contredisent totalement le modèle naïf proposé supra.
On peut donc supposer qu'en première approximation, le jerk (qui est la dérivée de l'accélération par rapport au temps) est constant. Il a été proposé par Meade[14] que le modèle d'ouverture du parachute devrait être décomposé en 3 phases qui sont :
Chute libre du parachutiste : le maître couple est S0 où la vitesse asymptotique est v0.
Phase d'ouverture du parachute où le maître couple augmente (linéairement ?). La vitesse v varie significativement ;
Phase terminale où le parachute est totalement ouvert et la vitesse de chute approche vt.
Les équations qui suivent sont basées sur le modèle de Meade[15]. En première approximation, on peut supposer que le rayon de la canopée varie linéairement en fonction du temps[15]. Donc pour un parachute semi sphérique, la surface efficace croîtra de manière quadratique en fonction du temps. Pour un parachute moderne ayant une forme allongée cylindrique (comme montré dans la figure ci-contre), on pourra considérer que la section efficace croîtra linéairement en fonction du temps vu que la surface efficace sera simplement proportionnelle au rayon du cylindre. Cela est confirmé en première approximation par l'étude de Knack[12] qui montre une croissance quasi linéaire du facteur de charge comme montré dans la figure ci-dessus.
L'équation dynamique s'écrit donc :
On suppose que la surface varie linéairement et l'on écrit
Soit t0 la durée du déploiement du parachute. L'équation dynamique peut alors s'écrire :
Calcul de l'équation dynamique lors d'un temps d'ouverture fini
On suppose qu'à t = 0, il y a équilibre. Donc,
On note . Donc, l'on a :
Donc,
Donc,
L'équation dynamique devient donc :
Donc,
On a : . Donc,
On rappelle que
Donc,
La solution rigoureuse de cette équation différentielle dite de Riccati fait intervenir les fonctions d'Airy qui sont nettement au-delà du but de cette discussion.
Comme l'on est intéressé par le comportement lors du début de l'ouverture du parachute et que l'on va démontrer que la décélération est supportable, on va linéariser l'équation différentielle et examiner le comportement lorsque t est petit.
On définit . On définit
On peut montrer que :
Donc,
On note que pour x petit, l'on a .
Donc, pour , on obtient :
On voit que pour x petit, le jerk est pratiquement constant.
Démonstration de la formule approchée
Donc,
Au début, la résistance de l'air est beaucoup plus grande que le poids et l'on a . On peut donc simplifier l'équation en
Donc,
On pose
Donc,
On est au premier ordre et t est petit (on enlève les termes du 2e ordre)
Donc,
On a une équation linéaire avec second membre.
La solution du système homogène est
On obtient donc :
Donc,
Donc,
On fait maintenant varier la constante K et l'on définit :
On obtient alors:
De manière équivalente :
Donc,
Il y a simplification et donc:
Le problème se ramène donc à calculer une primitive.
Donc,
Donc,
Donc,
On définit
Donc,
Donc,
Donc,
Donc,
La primitive de
On obtient donc:
Donc,
Donc,
À t = 0, on a x = 0. Donc,
Donc,
Donc,
Donc,
Donc,
Donc,
On voit que pour x petit, le jerk est pratiquement constant.
On va maintenant calculer une estimation grossière de l'accélération lorsque .
On démontre que
Calcul du temps normalisé
On considère x petit et l'on calcule x tel que l'on a
On résout :
On effectue un développement limité
Donc,
Donc,
Donc,
Donc,
Donc,
On suppose que et . On obtient alors
D'où x = 0.28
L'accélération estimée est donc la suivante
Calcul de l'accélération lorsque
Pour x petit, l'on a :
Donc,
On remplace d t / d x. Donc,
Donc,
On obtient donc :
Donc,
Donc,
Numériquement, on a :
L'accélération est alors de l'ordre de 7 g.
En outre, les résultats expérimentaux de Potvin sont cohérents avec ce modèle. Les mesures ont indiqué que le jerk était à peu près constant lors de l'ouverture du parachute et que l'accélération maximale était de l'ordre de 7 g.
Le modèle n'a pas tenu compte de l'élasticité des suspentes. Cependant, les valeurs sont très proches des valeurs expérimentales données par Potvin.
Rentrée de sondes spatiales
Lorsqu'un engin spatial rentre dans l’atmosphère, la vitesse est en général hypersonique (en atmosphère raréfiée) puis supersonique et le modèle ci-dessus ne s'applique pas[11].
↑(en) Jean Potvin and Gary Peek, « Parachute Opening Shock Basics », (consulté le )
↑ a et b(en) Robert V. Brulle, Engineering the Space Age: A Rocket Scientist Remembers, Air University Press, , 268 p. (ISBN978-1-58566-184-8, lire en ligne), p. 135
↑(en) Calvin Lee, « Modeling of Parachute Opening: An Experimental Investigation », Journal of Aircraft, Aerospace Research Central, vol. 26, no 5, (DOI10.2514/3.45783)
↑(en) Dean F. Wolf, « Parachute Deployment » (consulté le ), p. 5
↑ ab et c(en) Kenneth E. French, « Inflation of a Parachute », AIAA Journal, AIAA, vol. 1, no 11, (DOI10.2514/3.2113)
↑ a et b(en) Theo W. Knack, « Parachute Recovery Systems Design Manual », (consulté le ), p. 5-49
↑(en) Jean Potvin, « Universality Considerations for Graphing Parachute Opening Shock Factor Versus Mass Ratio », Journal of Aircraft, Aerospace Research Central, vol. 44, no 2, , p. 529-533 (DOI10.2514/1.24061)
↑(en) Douglas B. Meade, « ODE models for the parachute problem » (consulté le )
↑ a et b(en) Douglas B. Meade et Allan A Struthers, « Differential Equations in the New Millennium: the Parachute Problem », International Journal of Engineering, vol. 15, no 6, , p. 419 (lire en ligne, consulté le )
































































































![{\displaystyle w=Ke^{-x}={g \over t_{0}}\left({v_{0} \over v_{t}}\right)^{2}\left({v_{0} \over 2g}\right)^{2}\left[(e^{x}x-e^{x})+Cte\right]e^{-x}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/2d9bd39386389e862475d8e07c98e1034674ae61)






























 Portail de la physique
Portail de la physique  Portail du sport
Portail du sport  Portail du parachutisme
Portail du parachutisme 










