Satz von Stokes

Der Satz von Stokes oder stokessche Integralsatz ist ein nach Sir George Gabriel Stokes benannter Satz aus der Differentialgeometrie. In der allgemeinen Fassung handelt es sich um einen sehr grundlegenden Satz über die Integration von Differentialformen, der den Hauptsatz der Differential- und Integralrechnung erweitert und eine Verbindungslinie von der Differentialgeometrie zur Algebraischen Topologie eröffnet. Dieser Zusammenhang wird durch den Satz von de Rham beschrieben, für den der Satz von Stokes grundlegend ist.
Es geht darum, -dimensionale Volumenintegrale über das Innere in -dimensionale Randintegrale über die Oberfläche des Volumenstücks umzuwandeln. Häufig werden nur spezielle Varianten des allgemeinen Satzes betrachtet, aus denen das allgemeine Prinzip mehr oder minder gut ersichtlich ist, die aber für die jeweiligen Anwendungen wichtig sind. Die beiden wichtigsten Spezialfälle, der Gauß'sche Integralsatz und der spezielle Stokes'sche Integralsatz (siehe unten) entstammen der Vektoranalysis. In der Physik und der Elektrotechnik erlaubt der spezielle Satz von Stokes beziehungsweise der von Gauß elegante Schreibweisen physikalischer Zusammenhänge, zum Beispiel bei den integrierten Formen der Maxwell-Gleichungen.


Integralsatz von Stokes
Aussage
Sei eine orientierte n-dimensionale kompakte differenzierbare Mannigfaltigkeit mit abschnittsweise glattem Rand mit induzierter Orientierung. Dies ist für die meisten anschaulichen Beispiele, wie die Vollkugel mit Rand (Sphäre) oder den Torus (Rettungsring), gegeben.


Sei ferner eine auf (bzw. in einer hinreichend großen offenen Umgebung) definierte alternierende Differentialform vom Grad , die als stetig differenzierbar vorausgesetzt wird.


Dann gilt die folgende Aussage, die nach Stokes benannt wurde:

wobei die Cartan-Ableitung bezeichnet. Das rechte Integral kann man als Oberflächenintegral verstehen oder allgemeiner als Integral über die Mannigfaltigkeit .

Die Cartan-Ableitung ist hier gewissermaßen „dual“ zu der topologischen Operation , wodurch sich die in dieser Formel enthaltene Querbeziehung zwischen Aspekten der Analysis und topologisch-algebraischen Aspekten ergibt.

Anmerkungen

Unter der sehr allgemeinen Voraussetzung, dass gilt, mit -dimensionalen Basisformen , zum Beispiel mit




und mit dem äußeren Produkt , das unter anderem die Bedingung der Antisymmetrie erfüllt, , besagt die äußere Ableitung konkret das Folgende:



Besonders einfach wird der Beweis des „Hauptsatzes“, wenn wie beim nebenstehenden Beispiel eines Normalgebietes die Integrationsmannigfaltigkeit (in der Zeichnung genannt) in vertikale Streifen (in -Richtung) so segmentiert werden kann, dass nur an der gelb eingezeichneten „Oberseite“ und an der rot eingezeichneten „Unterseite“ nichttriviale Beiträge entstehen, und zwar wegen der ebenfalls eingezeichneten Orientierung (die Pfeilrichtungen) mit entgegengesetztem Vorzeichen.


Folgerung
Sei offen und eine stetig differenzierbare -Form in . Dann gilt für jede orientierte kompakte randlose -dimensionale Untermannigfaltigkeit die Aussage:






Anwendungen
Der (allgemeine) Satz von Stokes wird vor allem in der Mathematik verwendet. Er
- enthält als Spezialfälle für Physiker und Elektro-Ingenieure den Satz von Gauß und den speziellen Satz von Stokes (siehe unten), und
- bildet zweitens eine konkrete Verbindung zwischen differentialgeometrischen und algebraischen Aspekten der Topologie, indem etwa in einer differenzierbaren Mannigfaltigkeit zwei verschiedene Wege und , die vom gleichen Anfangspunkt ausgehen und zum gleichen Endpunkt führen, als topologisch homolog definiert werden, wenn für gewisse einstufige Differentialformen das Kurvenintegral verschwindet. Entsprechende Begriffe der algebraischen Topologie kann man auch mit dem höherdimensionalen Stokes'schen Satz aufbauen.



Integralsatz von Stokes für Ketten
Integration über Ketten
Sei ein glatter -Simplex und eine glatte, geschlossene Differentialform auf der glatten Mannigfaltigkeit . Dann ist das Integral über definiert durch



- .

Dabei bezeichnet den Rücktransport von bezüglich . Die Definition ergibt Sinn, da eine glatte Untermannigfaltigkeit mit Rand und induzierter Orientierung von ist. (Oder man versteht einfach als abgeschlossene Teilmenge des .) Im Fall entspricht die Definition dem gewöhnlichen Kurvenintegral. Ist eine glatte -Kette des singulären Komplexes, dann ist das Integral von über definiert als







Für den Fall findet man die Definition und weitere Informationen im Artikel Zyklus (Funktionentheorie).
Aussage
Sei eine glatte -Kette des singulären Komplexes und eine glatte -Differentialform auf der glatten Mannigfaltigkeit . Dann gilt


Mit wird der Randoperator des singulären Komplexes bezeichnet.

Anwendung
Dieser Satz zeigt eine Verbindung zwischen differentialgeometrischen und topologischen Eigenschaften einer glatten Mannigfaltigkeit auf. Betrachtet man nämlich die De-Rham-Kohomologie und die singuläre Homologie von , so erhält man durch



mit einen Homomorphismus. Aufgrund des Satzes von Stokes ist dieser Homomorphismus wohldefiniert und es kommt nicht auf die Wahl des Repräsentanten der Homologieklasse an. Seien und zwei Repräsentanten der gleichen singulären Homologieklasse, dann gilt , denn zwei Repräsentanten unterscheiden sich nur um ein Element des Randes. Daher folgt mit dem Satz von Stokes





Die letzte Gleichheit gilt, da ein Element der De-Rham-Kohomologie ist und daher gilt. Ist eine exakte Differentialform, dann gilt



Nach dem zentralen Satz von de Rham ist der Homomorphismus sogar ein Isomorphismus.
Zugrundeliegendes topologisches Prinzip
Hinter dem Stokes'schen Satz steckt ein allgemeines topologisches Prinzip, das in seiner einfachsten Form besagt, dass sich bei „orientierter Pflasterung eines Flächenstücks“ im Innern die Wege „wegen Gegenverkehrs“ paarweise aufheben, sodass nur die Randkurve übrig bleibt.

Links in der Skizze sieht man vier kleine, gleich orientierte „Pflastersteine“. Die in der Mitte eingezeichneten „inneren Wege“ werden paarweise in entgegengesetzter Richtung durchlaufen; ihre Beiträge zum Linienintegral heben sich deshalb gegenseitig auf, sodass nur der Beitrag der Randkurve übrigbleibt. Es genügt also, die Integralsätze nur für möglichst kleine „Pflastersteine“ zu beweisen.
Bei hinreichender Verfeinerung der Pflasterung ist das im Allgemeinen fast elementar.
Spezialfälle
Mehrere Spezialfälle des allgemeinen Satzes von Stokes sind in der klassischen Vektoranalysis von Bedeutung. Dazu gehört natürlich der klassische Satz von Stokes. Er folgt aus dem allgemeinen Satz mit . Außerdem sind auch der Hauptsatz der Differential- und Integralrechnung, der Satz von Green und der Gauß’sche Integralsatz Spezialfälle des allgemeinen Stokes'schen Satzes.

Hauptsatz der Differential- und Integralrechnung
Sei ein offenes Intervall und eine stetig differenzierbare Funktion. Dann ist eine 1-Form (sog. Pfaff'sche Form), und der allgemeine Stokes'sche Integralsatz entartet zu

![{\displaystyle f\colon [a,b]\to \mathbb {R} }](https://wikimedia.org/api/rest_v1/media/math/render/svg/c5ab61178bf5349838758ffe3d96135406ed0245)


Dies ist der Hauptsatz der Differential- und Integralrechnung.
Gaußscher Integralsatz
Für eine kompakte Teilmenge des und ein n-dimensionales Vektorfeld erhält man als einen weiteren Spezialfall den gaußschen Integralsatz.




Dabei ist der -dimensionale Normalen-Einheitsvektor und die Integrale sind jetzt - beziehungsweise -dimensional, wobei die Größe auch als geschrieben wird. Wählt man




so ergibt sich der gaußsche Integralsatz aus dem stokesschen.
Man kann diesen Satz auch zur Definition der Divergenz eines Vektorfeldes benutzen, wobei diese Definition unabhängig von den benutzten Koordinaten ist.
Klassischer Integralsatz von Stokes




Der klassische Integralsatz von Stokes ist auch als Satz von Kelvin-Stokes oder Rotationssatz bekannt. Er findet bei Physikern und Elektrotechnikern Anwendung vor allem im Zusammenhang mit den Maxwell-Gleichungen. Er besagt, dass ein Flächenintegral über die Rotation eines Vektorfeldes in ein geschlossenes Kurvenintegral über die Tangentialkomponente des Vektorfeldes umgewandelt werden kann. Dies ist hilfreich, da das Kurvenintegral das Vektorfeld allein enthält und in der Regel einfacher zu berechnen ist als Flächenintegrale, zumal dann, wenn die betrachtete Fläche gekrümmt ist. Darüber hinaus sind die Kurvenintegrale in vielen Anwendungen unmittelbar betroffen – und erst in zweiter Linie die zugehörigen Flächenintegrale –, zum Beispiel beim faradayschen Induktionsgesetz. Ist speziell gegeben, so führt die Tatsache, dass viele verschiedene Mannigfaltigkeiten in eine einzige geschlossene Randmannigfaltigkeit „eingezwängt“ werden können, zur Eichinvarianz von Theorien wie der von Maxwell.
Aussage
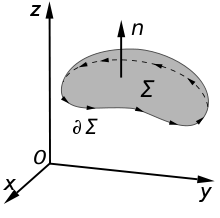
Es sei eine offene Teilmenge des dreidimensionalen Raumes und ein auf definiertes einmal stetig differenzierbares Vektorfeld. Dies wird gefordert, damit der Ausdruck gebildet werden kann. Weiter sei eine in enthaltene zweidimensionale reguläre Fläche, die durch ein Einheitsnormalenfeld orientiert ist (das heißt, es sei definiert, was die „Oberseite“ der Fläche ist). Außerdem sei der Tangenteneinheitsvektor der Randkurve. Mit der Eigenschaft regulär wird sichergestellt, dass der Rand hinreichend glatt ist.






Der Rand von wird mit bezeichnet. Im Folgenden wird dieser Rand stets mit einer geschlossenen Kurve identifiziert. Mit all diesen Voraussetzungen gilt
- .

In den Anwendungen schreibt man auch

mit und . Ferner sind die Rotation und (beziehungsweise ) das Skalarprodukt der zwei Vektoren . Die Form ist die Volumenform der zweidimensionalen Fläche und ist das Längenelement der Randkurve.








Anmerkungen
In dem Fall, dass eine flache Teilmenge darstellt, gilt in geeigneten Koordinaten . Ist nicht flach, so lässt sich unter der Voraussetzung, dass sich die zweidimensionale Fläche mit der Parametrisierung

- mit


in Segmente zerlegen lässt, die Volumenform für festes durch



berechnen. Auch der Vektor lässt sich analog berechnen, und zwar ist der aus den drei Komponenten des Vektorprodukts gebildete Einheitsvektor, das heißt

- .

Beispiel
Es sei eine als Normalgebiet bezeichnete flache Mannigfaltigkeit, welche den Anforderungen des Satzes genügt, und das Vektorfeld gegeben durch . Das Einheitsnormalenfeld sei gegeben durch Dann gilt




Nach dem Satz von Stokes gilt

Dieses Beispiel zeigt, dass der Satz von Green ein Spezialfall des stokesschen Integralsatzes ist.
Literatur
- Herbert Amann, Joachim Escher: Analysis. Band 3. 2. Auflage. Birkhäuser Verlag, Basel u. a. 2008, ISBN 978-3-7643-8883-6.
- Konrad Königsberger: Analysis. Band 2. 4. überarbeitete Auflage. Springer, Berlin u. a. 2002, ISBN 3-540-43580-8.
- John M. Lee: Introduction to Smooth Manifolds (= Graduate Texts in Mathematics 218). Springer, New York NY u. a., 2. Aufl. 2012, ISBN 978-1-44199981-8.
- Hans Grauert, Ingo Lieb: Differential- und Integralrechnung. Band 3: Integrationstheorie. Kurven- und Flächenintegrale, Vektoranalysis (= Heidelberger Taschenbücher 43). 2. neubearbeitete und erweiterte Auflage. Springer, Berlin u. a. 1977, ISBN 3-540-08383-9.









